با سلام
با توجه به تجربه ای که در این زمینه دارم.
در مرحله اول LoRa درست است رنج بالایی دارد ولی سرعت پایینی دارد و به درد پردازش های کواد نمیخورد.
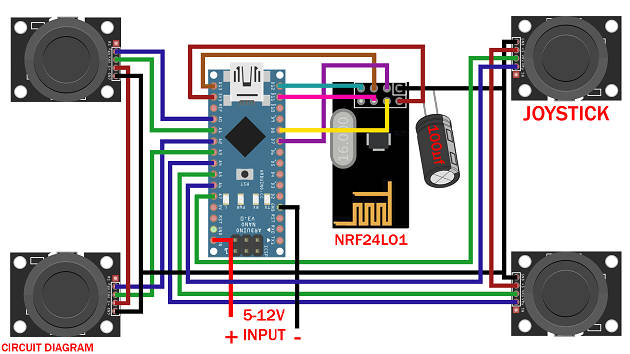
NRF آبشن خوبی هست ولی رنج خیلی بالایی را نمی توانید ازش بگیرید (خودم این کار را انجام دادم)
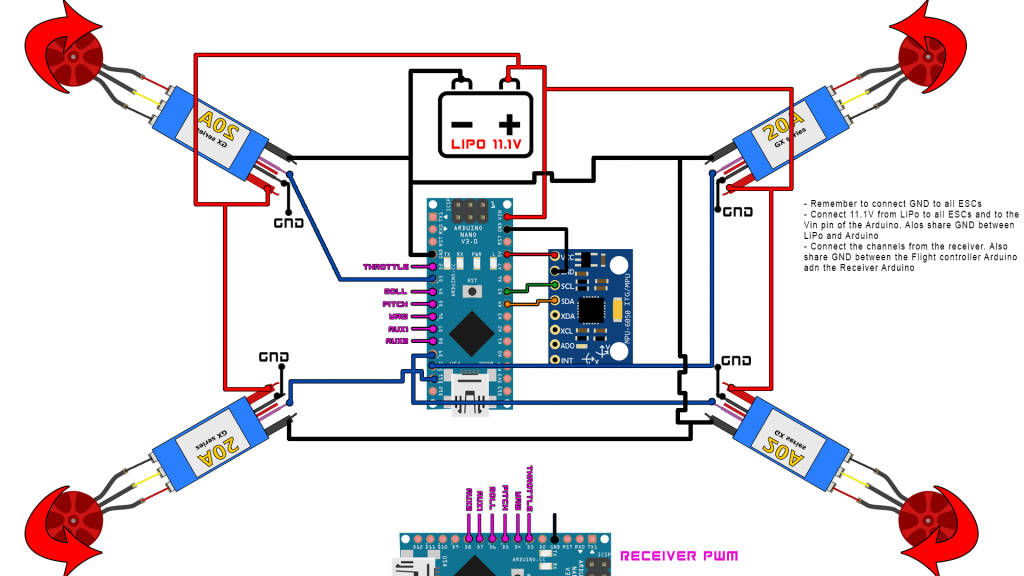
در مورد فلایت کنترل نیز درصورتی که از موتور های براش لس میخواهید استفاده کنید آردوینو Nano رو پیشنهاد نمیکنم.
چون هم قدرت پردازشی کافی ندارد هم پایه کم خواهید آورد.
یا از فلایت کنترل های آماده استفاده کنید
یا از آردوینو Mega حداقل استفاده کنید که کتابخانه آماده برای فلایت کنترل دارد که اسمش هم MultiWii هست.
البته ESP هم چندی هست که کتابخانه ای برای این منظور داده است.
برای بحث کنترل نیز اگر میخواهید کنترلر را نیز خودتان بسازید نیز پیشنهاد میکنم از Arduino nano به عنوان واسط استفاده کنید که در سمت فرستنده دیتا ها را از جوی استیک بگیرد و با استفاده از NRF ارسال کند. و در سمت مقابل نیز این دیتا ها را دوباره Nano بگیرد و یا به صورت PWM یا PPM به آردوینو مگا بدهد. (این فکر را نیز که NRF را به Mega وصل کنم را از سر خود بیرون کنید انقدر قدرت پردازشی وجود ندارد که بخواهید برای این کار نیز تخصیص بدهید، این مسیر را در زمان دانشجویی رفته ام)
برای اطلاعات بیشتر پیشنهاد میکنم آموزش های این سایت را بررسی کنید.
همچنین در همین سایت کار های زیادی با NRF کرده است که می توانید از همه این موارد کمک بگیرید.